Sensor-Placement-Agnostic Sonomyography: Toward Continuous High-Dimensional Control by Users with Tetraplegia
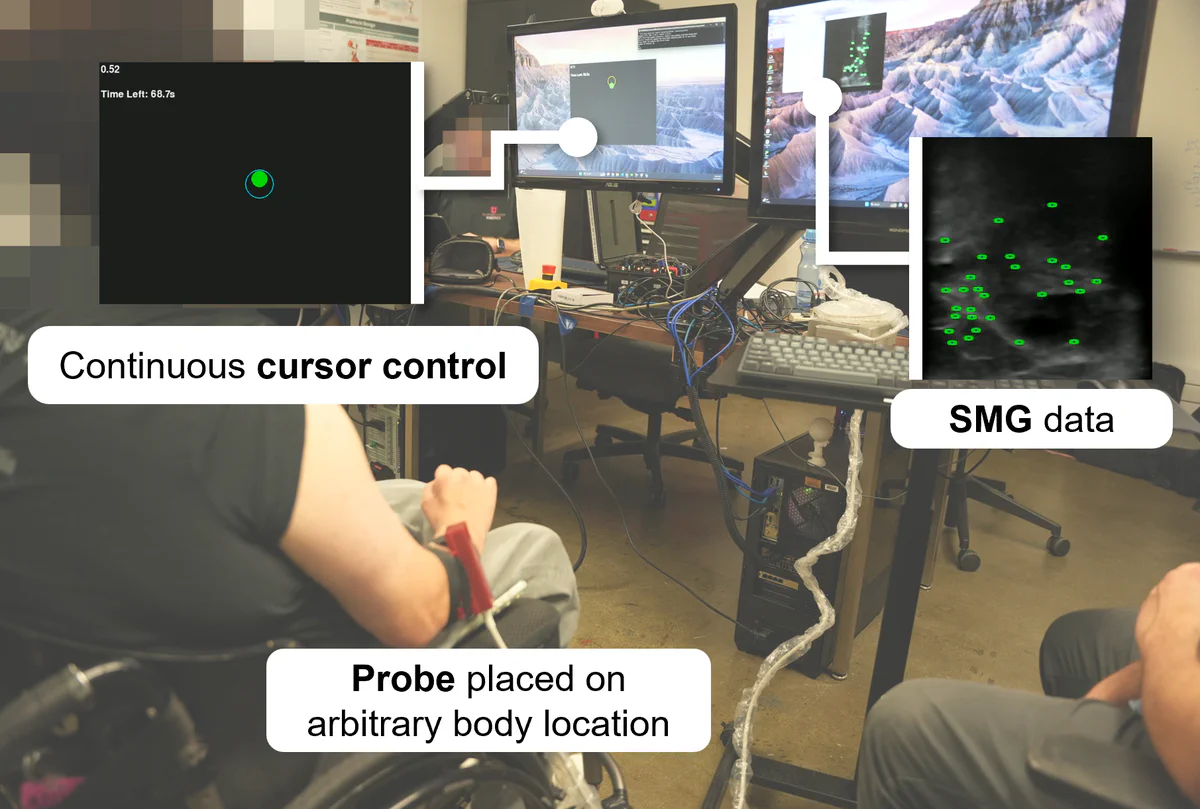 System enabling continuous cursor control from SMG data collected from arbitrary sensor locations.
System enabling continuous cursor control from SMG data collected from arbitrary sensor locations.Abstract
Sonomyography (SMG) enables continuous device control via ultrasound-measured muscle deformation signals, but existing SMG interfaces generally require substantial user- and sensor-location-specific training data and provide only one proportional signal or task-specific classification. We present a real-time, sensor-placement-agnostic SMG control system based on sparse optical flow tracking that enables continuous 1-DOF control after minimal calibration (3 pose definitions). We also present a preliminary expansion of this method that augments this algorithm with a short computer-aided calibration to enable 2-DOF control.
We evaluate both 1- and 2-DOF systems’ performance for a preliminary cohort of 3 cervical spinal cord injury survivors and 6 uninjured individuals across 6 sensor placements spanning the arm, neck, and upper torso. As assessed by a cursor trajectory tracking task, all participants achieved continuous 1-DOF control at all tested sensor locations (even those that relied on passive tissue motions), with all participants achieving <5.5% tracking error using at least one placement (and many <4% across many). All participants were also able to modulate 2D cursor position via the 2-DOF system, with varying levels of control authority, and several were able to complete a 2D drawing task, constituting the first (to our knowledge) demonstration of location-agnostic multi-DOF continuous SMG-based control. These results highlight the promise of SMG to enable rapidly calibratable, high-dimensional, sensor-placement-agnostic device control by users with tetraplegia, and also illuminate key challenges in both signal processing and practical system deployment. To enable further development by scientific and user communities, developed algorithms have been open-sourced as part of the OpenMyoControl project on SimTK (https://simtk.org/projects/openmyocontrol).
Gavin Sueltz
BS/MS Student, ME
Vikram Athithan
Undergraduate, ME
Emma Ferran
Undergraduate, ME
My research interests include robotics and program-based automation; manufacturing; and thermodynamic, dynamic, and static systems.
Maria Herrera
BS/MS Student, ME
Carson J. Wynn
PhD Student, Robotics
My research interests lie in human–robot interaction. I want to model the interaction between human and robot, discover new techniques and technologies, and contribute to the HRI field.
Laura A. Hallock
Assistant Professor of Mechanical Engineering
My research interests include robotic assistance and rehabilitation, neuromusculoskeletal sensing, and human–robot control interfaces.