Research
The HRELab’s research portfolio is organized around two complementary thrusts:
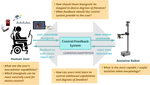
- Assistance: Interfaces, control methods, and learning frameworks that help people command assistive devices more intuitively and robustly.
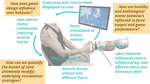
- Rehabilitation: Robot-mediated therapy systems, models, and interaction designs that support effective movement practice and recovery.
The pages below provide a short overview of each thrust and associated publications.