Characterizing Healthy & Post-Stroke Neuromotor Behavior During 6D Upper-Limb Isometric Gaming: Implications for Design of End-Effector Rehabilitation Robot Interfaces
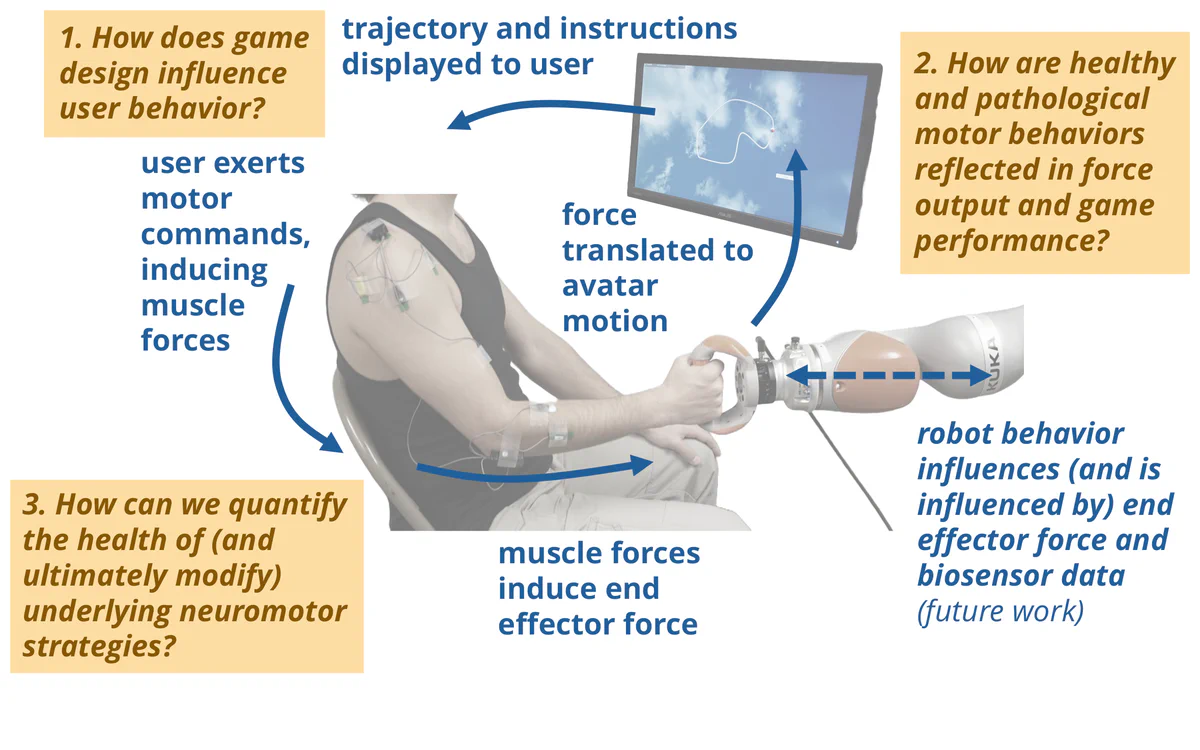 Key, interdependent questions for design of end effector robot-mediated rehabilitation.
Key, interdependent questions for design of end effector robot-mediated rehabilitation.Abstract
Successful robot-mediated rehabilitation requires designing games and robot interventions that promote healthy motor practice. However, the interplay between a given user’s neuromotor behavior, the gaming interface, and the physical robot makes designing system elements — and even characterizing what behaviors are “healthy” or pathological — challenging. We leverage our OpenRobotRehab 1.0 open access data set to assess the characteristics of 13 healthy and 2 post-stroke users’ force output, muscle activations, and game performance while executing isometric trajectory tracking tasks using an end-effector rehabilitation robot. We present an assessment of how subtle aspects of interface design impact user behavior; an analysis of how pathological neuromotor behaviors are reflected in end-effector force dynamics; and a novel hidden Markov model (HMM)–based neuromotor behavior classification method based on surface electromyography (sEMG) signals during cyclic motions. We demonstrate that task specification (including which axes are constrained and how users interpret tracking instructions) shapes user behavior; that pathology-related features are detectable in 6D end-effector force data during isometric task execution (with significant differences between healthy and post-stroke profiles in force error and average force production at
Ajay Anand
PhD Student, Robotics
I build robots to improve lives. My research interests include rehabilitation robotics, human sensing and modeling, medical robotics, and computer vision.
Gabriel Parra
Undergraduate, CS & Applied Mathematics
Chad A. Berghoff
Undergraduate, ME
My research interests include myocontrol, medical and rehabilitation robotics, advanced manufacturing, and rapid prototyping.
Laura A. Hallock
Assistant Professor of Mechanical Engineering
My research interests include robotic assistance and rehabilitation, neuromusculoskeletal sensing, and human–robot control interfaces.