Toward Optimization of Surface Electromyography Sensor Placement for Intuitive and Adaptive Assistive Device Control
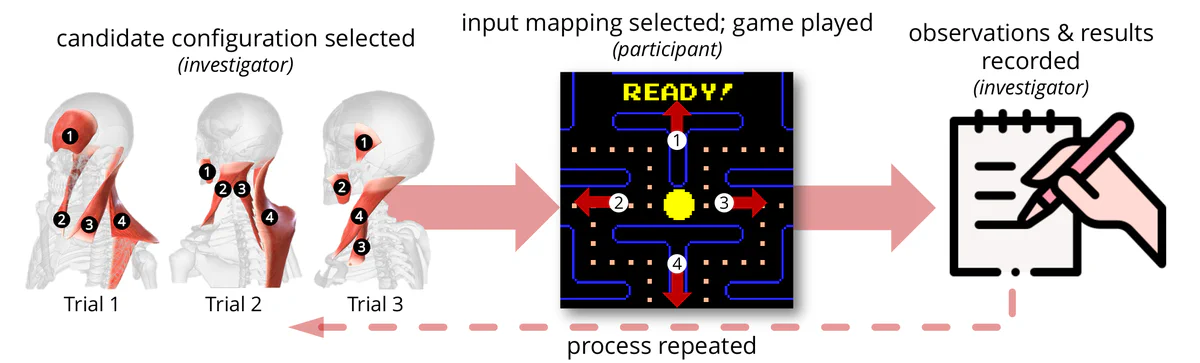 Iterating over surface electromyography (sEMG) sensor placement as users played Pac-Man yielded insights on preferred and effective configurations.
Iterating over surface electromyography (sEMG) sensor placement as users played Pac-Man yielded insights on preferred and effective configurations.Abstract
BACKGROUND AND AIMS: Assistive robot manipulators allow tetraplegic individuals to interact with their environment, but generally lack the high degree-of-freedom (DoF) control interfaces required to emulate a healthy human’s dexterity. Surface electromyography (sEMG) is a promising tool for measuring high-DoF intent signals. However, there is no consensus on the best sensor placement to enable robust collection of independent signals. To address this gap, we empirically analyze sEMG sensor placement — including independence across channels, user reliability, and susceptibility to fatigue — as a first step toward intuitive and adaptable high-DoF device control.
METHODS: Three participants were instrumented with four-channel sEMG sensing in various configurations above the shoulders. These signals were mapped to Pac-Man’s control inputs to test the user’s ability to modulate each signal. Sensor placements were evaluated via game performance, participant feedback, and investigator observations to determine channel independence, muscle fatigue, isometric control feasibility, and social acceptability.
RESULTS: Users easily modulated signals from several muscles (sternocleidomastoid, upper trapezius), which appeared effective by all examined measures, while others (auricularis superior) were ideal for some users but unusable by others. Fatigue was most evident in rarely-used muscles. Symmetric muscles showed dependence in activation, especially during isometric contraction. User preferences and abilities were heterogeneous, even within the small, healthy initial cohort, highlighting the importance of multifaceted analysis.
CONCLUSION: The data and insights above illustrate the importance of intentional, informed sensor placement for measurement of intent, and will be used to design candidate sEMG configurations for control of high-DoF assistive robotic manipulators.
Carson J. Wynn
PhD Student, Robotics
My research interests lie in human–robot interaction. I want to model the interaction between human and robot, discover new techniques and technologies, and contribute to the HRI field.
Evan Cole Falconer
Undergraduate, ME & CS
My research interests are high-degree-of-freedom prosthetics, technology-assisted rehabilitation, and improving human–robot interaction.
Maria Herrera
BS/MS Student, ME
Laura A. Hallock
Assistant Professor of Mechanical Engineering
My research interests include robotic assistance and rehabilitation, neuromusculoskeletal sensing, and human–robot control interfaces.